This article also has an English version.
本系列文章主要介绍如何设计和实现一个基于 io-uring 的 Thread-per-core 模型的 Runtime。
我们的 Runtime 最终产品 Monoio 现已开源,你可以在 github.com/bytedance/monoio 找到它。
- Rust Runtime 设计与实现-科普篇
- Rust Runtime 设计与实现-设计篇-Part1
- Rust Runtime 设计与实现-设计篇-Part2
- Rust Runtime 设计与实现-组件篇
- Rust Runtime 设计与实现-IO兼容篇
本文是系列的第五篇。本来写四篇已经结束的,最近增加了 epoll 支持(!73),干脆写一下这块的设计吧。
Monoio 之前仅支持 io_uring,但无论是公司外分发二进制应用,还是公司内大规模发布,都会对内核版本有较高的要求。字节内部的内核版本升级往往是一个很漫长的过程,而外部用户的内核就更难以保证了。
所以我们想要提供 legacy 的 IO driver 支持。不同于业界已有方案,我们计划将其作为无感知的支持方式:即用户或框架仍然使用类似 uring 模式操作 IO(即我们的 AsyncReadRent/AsyncWriteRent),Runtime 内部通过 syscall 感知当前环境的支持情况并做 fallback。
也就是说,用户只需要写一套代码而无需担心兼容性问题(目前其他开源方案都强绑定了 uring 和 epoll 之一,以及绑定了对应的用户编程模式和 API,无法做到无缝迁移和低版本环境无缝适配)。
epoll 的正确使用姿势
legacy io driver 在 linux 下当然是 epoll 了。
在本系列分享的第一篇里已经简要介绍过了,当时我们的例子中使用了 polling 这个 crate 提供的包装,这个包装在 epoll 实现中用了 oneshot 模式。和字面意思一样,oneshot 只会被触发一次,所以需要每次使用完继续等待时再调用 syscall add 上去。往往我们需要对同一个 fd 做多次操作,所以这种一次性的就绪通知明显不太经济。
Mio 作为使用更为广泛的 poll 包装库,使用了更为高效的 edge trigger 模式。这种模式下,fd 和对应 interest 仅需要被注册一次,epoll_wait 仅在 io 的就绪状态由未就绪切换为就绪态时得到通知。
当然,有得就有舍,这种模式下我们必须在用户态维护就绪状态。虽然这个话题可以说是校招面试必问八股文之一了,还是顺便提一嘴。比如我们仅依靠内核的通知,那么我们要么一次把 io 搞到空,否则在某次 io 操作后,可能 io 还是在就绪态,我们等 kernel 的通知就永远等不来了。所以内部需要记录一下,如果 io 已经就绪了,就不等待了,直接做对应 syscall。
Mio 基本算是跨平台 poll 的较 low level 封装,其内部不维护前面说到的 io 就绪状态,这个状态维护是需要其更上层的 runtime 做的。
我们以 Tokio 为例简要分析一下注册和操作 IO 两个过程。
IO 注册
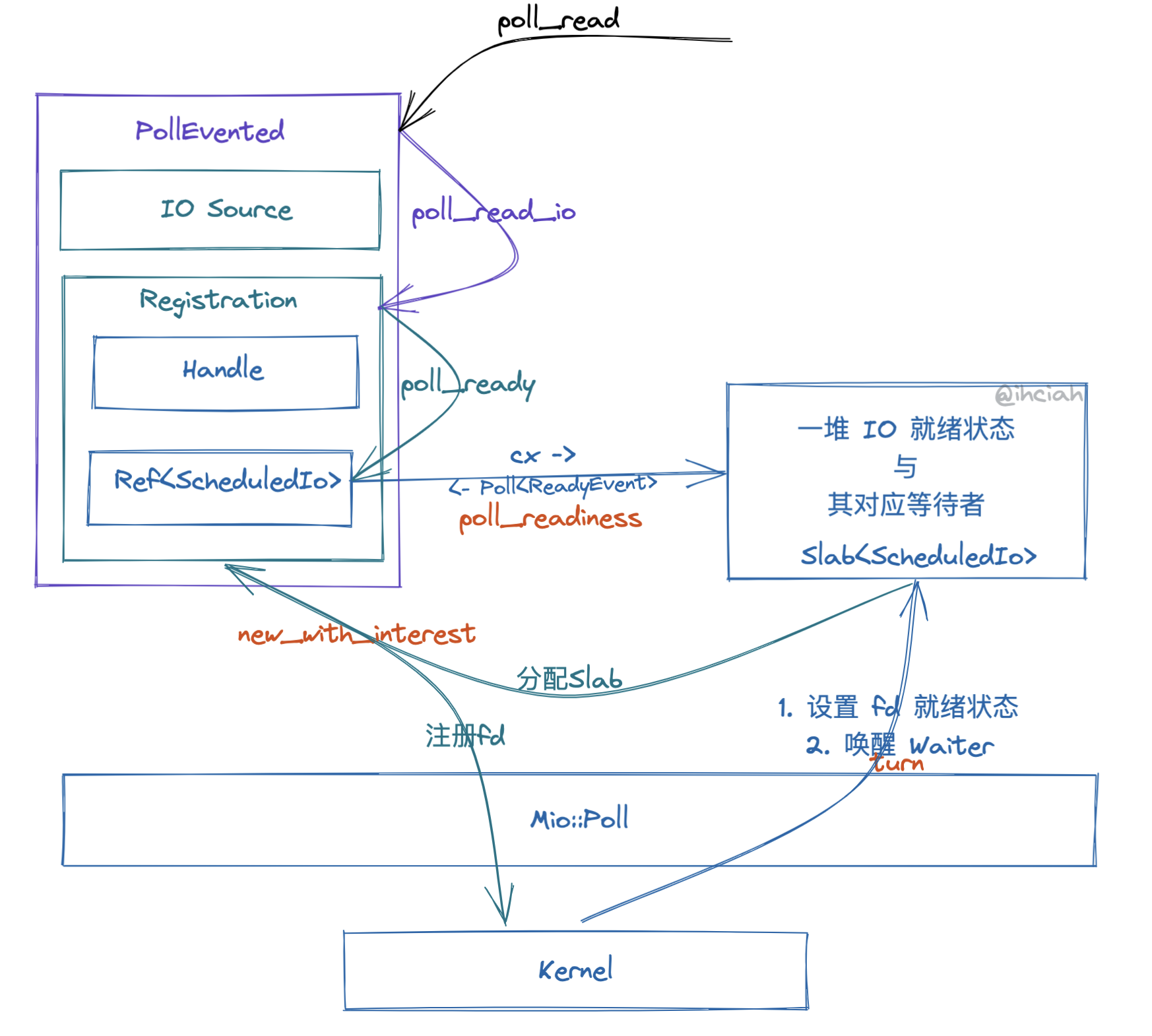
在创建 IO 时,如 TcpListener accept 到一个 fd,那么这个 fd 会被包装为 TcpStream。TcpStream 内其实是一个 PollEvented 结构,很多面向用户的结构(如 UnixStream 等)都只是 PollEvented 的包装。
PollEvented 创建时即会做 fd 和 interest 的注册,drop 时会解注册。IO 的就绪状态和等待者是在一个统一的 Slab 中管理的(对应 Registration 这个概念)。PollEvented 内部包含 io 和 注册信息 两部分;注册信息 又持有了 Driver Handle 和 **Ref<ScheduledIo>**。
在 PollEvented 创建时,会从 TLS 拿到当前 Driver 的 Handle,并将自己的 Interest 注册上去。注册的时候 Driver 内部会在 slab 中分配一块空间存放其状态信息(即 ScheduledIo),并在返回的注册信息中记录该状态在 slab 中的 index。
IO 操作
通过 PollEvented,tokio 可以为其他上层网络封装提供 poll_read 和 poll_write 的方法实现。
poll_read 实现的核心代码这么几行:
1 | let n = ready!(self.registration.poll_read_io(cx, || { |
其将读方法作为闭包丢给 poll_read_io 处理:
1 | loop { |
poll_read_io 内部主要做两件事情:
等待 fd ready
做 io
- 如果 io 返回 WOULD_BLOCK 则将注册信息中
Ref<ScheduledIo>清除就绪状态,并继续循环。
- 如果 io 返回 WOULD_BLOCK 则将注册信息中
难点主要在于 poll_ready,poll_ready 又会调用 poll_readiness。
poll_readiness 这段代码比较复杂,复杂度主要在于解决跨线程下的同步问题。其 atomic 中包含了 Generation 和 Tick 信息,在修改时会校验并 CAS。其中 Generation 是全局递增的,用于标记线程;Tick 是线程级别的,用于标记不同轮次的 epoll wait。这些机制保证了在 fd 被跨线程操作时不会漏信号。
不过鉴于我们的 Runtime 本身设计上不支持这类操作,所以在此不详细展开。总结一下,tokio 对 io 的操作在 driver 内部只有感知 readiness 能力,io syscall 的执行是交给网络组件自己做的。
兼容方案
我们需要基于 epoll(mio) 的 driver 暴露和基于 io_uring driver 相同的接口。
模拟 uring 方案
因为 uring = 等待就绪+执行;而 epoll 只有等待就绪这个能力,所以一个很直接的想法是,我们把 syscall 执行帮忙做掉不就把能力补齐了吗?基于 Mio 自行“模拟”一个 uring,暴露 uring 形式的接口。
Tokio 为代表的基于 epoll 的 runtime 只需要感知到就绪事件后,设置 fd 就绪状态并唤醒对应 Interest 的 tasks;我们模拟 uring 的话在此基础上还要帮用户做 syscall。
每个 fd 对应一个附属结构,其中包含:
读写队列(分开,两个独立的队列):
- 当通过 epoll 感知到 fd 就绪时,设置 fd 的就绪状态,执行 syscall 并 wake 队列中的 task。
- 除了存储等待在其上的 waker 外,还需要存储任务本身,因为我们需要帮用户执行 syscall,syscall 成功执行后才 wake task。
就绪状态:新推入读写队列的请求可以根据这个状态来决定是否直接执行 syscall,或将自身放入读写队列中。
这个方案需要我们抽象 uring 的访问形式,而不是目前的裸接入 uring。
考虑到这部分其实有大量冗余封装和匹配开销,没有采用。
OpAble 方案
一个 Op 结构(如 Connect,其指定了 fd 和 OsSocketAddr)产生 io_uring Entry 是由其自己实现的,那么我们能不能将这个实现扩展为一个 Trait,让其自行实现如何对接 epoll 呢?
让我们思考一下,基于 io_uring,Connect 这类结构(下文将其称为 Op,因为它代表了一个 Operation)只需要造出一个 Entry,之后 driver 内部将其推入 SQ,然后从 CQ 消费到的是一个通用表示,包括 user_data、result 和 flag。driver 内部只需要用 user_data 从状态存储 Slab 定位到该任务,并设置状态、唤醒 waiter。
在 epoll 下,基本单位不再是“任务”,而是 io。io 包括了其对应的就绪状态、等待在其上的读 waiter、写 waiter。driver 通过 epoll_wait 感知到某个就绪事件后,需要拿着该事件的 user_data 从 Slab 中查找到该 io,更新其就绪状态,并根据该事件中的就绪状态决定是否唤醒读 waiter 和 写 waiter。
唤醒 waiter 之后,还需要执行 io syscall。这里其实有 3 种方案:
- 内部实现,内部执行 -> 对应前面的模拟 uring 方案
- 外部实现,内部执行 -> 本方案,外部 Op 以实现 OpAble 的形式提供具体的 syscall 执行函数
- 外部实现,外部执行 -> tokio 等 runtime 的方案,driver 对外暴露 poll_readiness,具体的执行者自己做 syscall,并在 syscall 返回后判断是否是
WOULD_BLOCK,如果是则需要设置 runtime 内的 readiness(可以参考net/TcpStream的实现)
对比方案 1,本方案给 Op 提供了更大的自由度(虽然其实也没啥用,但能省点封装),可以用来实现 async fn ready() 这种行为(不做 syscall 即可,这个是由 Op 自己实现决定的);另外也可以省掉一些 match 比较开销(这也是封装带来的代价)。
对比方案 3,将 syscall 在 driver 内部执行掉一来可以省掉 WOULD_BLOCK 判断(重复代码,每个组件都要写的),二来对组件屏蔽了 uring 和 epoll 的差异,因为在本方案中,epoll 和 uring 都是向组件直接返回 syscall 结果。
1 | pub(crate) trait OpAble { |
在本方案中,组件(如 net/TcpStream)只感知 Op(不感知 uring/epoll 差别);Op 实现 uring 行为和 epoll 行为(作为提供透明兼容能力的 runtime,当然都要实现啦);Runtime 启动后选用的不同 driver 会调用不同的 Op 行为。
一个 Op 实现例子(这个例子中从 mio 里搬了一部分代码,它的实现本身并不涉及 epoll/uring 的判定):
1 | /// Accept |
IO 注册问题
别忘了,使用 epoll 需要将 fd 和 interest 事先注册上去,并在内部管理就绪状态,不是 uring 那种把任务扔进去就行的。
网络组件持有 fd 实际上持有的是 SharedFd(它设计上的主要目的是在 uring entry 推入 kernel 后能够维持 fd 打开的状态),当创建 SharedFd 时,我们可以在其内部判断当前 io driver 类型并决定是否注册,同理 drop 时也会做摘掉的操作。
就绪状态和等待者的管理仍旧采用 Slab 便于 O1 查找、删除。
能力暴露
我们支持了 Legacy 和 Uring 两种 io driver,怎么暴露给用户使用呢?
首先我们通过暴露 feature 利用条件编译来消除用户不想要的分支(比如用户明确指定要 uring 或 legacy);其次是我们通过宏参数或者 builder 参数来允许用户在运行时指定 driver。
同时,我们也提供了一个 FusionDriver,用于自动探测当前平台支持性,并自动选用对应 driver。默认情况下,使用 #[monoio::main] 就会使用这个行为,方便不同平台不同内核版本的用户都能愉快启动。